Contact: haimin@cs.jhu.edu

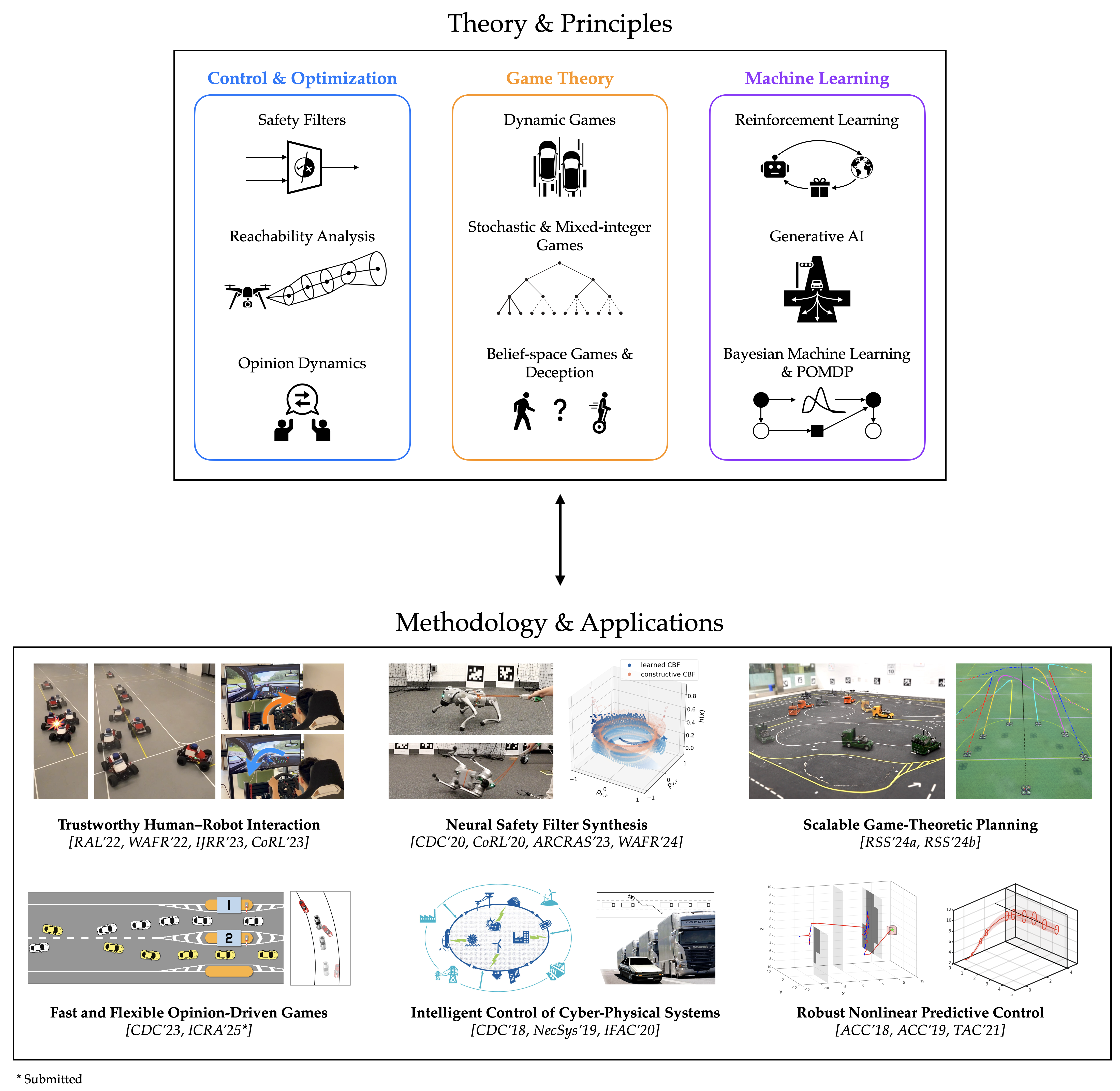
Hello and welcome! I am an Assistant Professor at JHU CS, where I direct the Alliance AI Lab. My research aims at enabling safe human-centered robotic systems that can be verified, deployed, and trusted. Towards this goal I work on new algorithms and theorems centered around dynamic game theory, integrating insights from machine learning and safety-critical control. I ground my work in real-world robotic and cyber-physical systems such as miniature autonomous vehicles, quadrupedal robots, AI-assisted race cars, and quadrotors. I am a 2026 Penn AI Fellow, 2025 RSS Pioneer, 2025 NSF CPS Rising Star, and 2024 HRI Pioneer.
Watch the JHU Alliance AI Lab Trailer:
Recent News:
- [Feb. 2026] ✨ I am selected as a Penn AI Fellow.
- [Oct. 2025] 💼 Starting my postdoc training at xLAB@Penn.
- [Aug. 2025] 🎓 I defended my PhD! Here is my thesis.
- [Apr. 2025] 🔥 I am thrilled to join Johns Hopkins University as an assistant professor in the Department of Computer Science and Data Science and AI Institute in Fall 2026.
- [Apr. 2025] 🤖 I am named a Robotics: Science and Systems Pioneer (30 top early-career robotics researchers)!
- [Feb. 2025] ✨ I am selected as an NSF CPS Rising Star!
- [Jan. 2025] 💼 I am co-organizing the inaugural Workshop on Public Trust in Autonomous Systems at ICRA 2025.
- [Dec. 2024] 🎙️ Invited to present at the GRASP SFI Seminar.
- [Jan. 2024] 💼 I am appointed as an Associate Editor of IEEE RA-L.
- All news