Autonomous robots are becoming more versatile and widespread in our daily lives. From autonomous vehicles to companion robots for senior care, these human-centric systems must demonstrate a high degree of reliability in order to build trust and, ultimately, deliver social value. How safe is safe enough for robots to be wholeheartedly trusted by society? Is it sufficient if an autonomous vehicle can avoid hitting a fallen cyclist 99.9% of the time? What if this rate can only be achieved by the vehicle always stopping and waiting for the human to move out of the way?
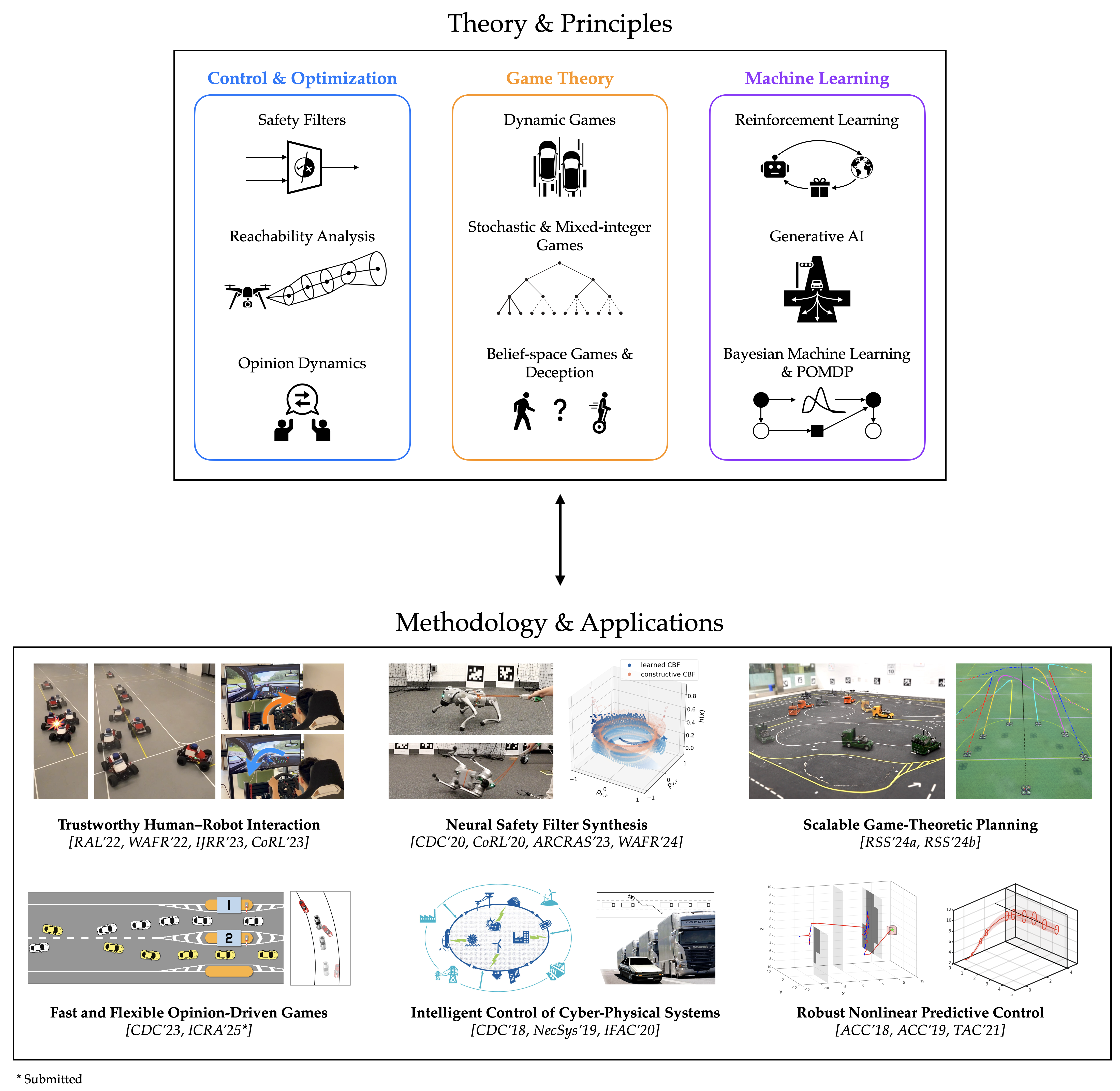
My vision is to enable human-centered robotic systems that can be built, deployed, and verified with safety assurances under minimal performance loss. Towards this goal, my research focuses on interactive motion planning in the joint space of physical and information states (e.g., beliefs), actively ensuring safety and improving efficiency as robots autonomously navigate uncertain environments and interact with people. The key thrusts of my research include:
Scalable game-theoretic decision-making
Planning while accounting for strategic interactions among many agents is hard, especially with uncertainties induced by learning components and indecisions! My solver draws insights from mixed-integer optimization, machine learning, and bifurcation theory, and runs in real-time for teamed robots on the ground and in the air.
Safe and performant human-robot interaction
Robots will be everywhere. How can we trust them to be safe and performant around people? My work showed that by planning and safeguarding in the joint space of physical and information states (generally, we call them doxo-physical states), we can ensure safety and maintain efficiency for human-robot interaction.
Verifiable neural safety analysis
Computing a safety-assured controller is a fundamental open problem for robots with high-dimensional, nonlinear dynamics. I pioneered algorithms that learn robust neural controllers with theoretical guarantees on their training-time convergence and deployment-time safety.
Please explore my complete list of publications here. Here is my research statement: